I got pulled in to help with the Arduino "brain" of each robot. I mostly wrote the firmware for the Arduino but also did some of the circuit design.
All of the robots runs a basic object avoidance routine and, just for fun, each 'bot periodically stops what it's doing and runs a dance sequence. The robots turned out pretty well; here's a look at them:
TurtleBot

The TurtleBot is a four wheeled robot. Two continuous rotation servos run the wheels, one positional servo turns the head left and right. An ultrasonic range finder is mounted in the head. The robot travels forward until it encounters an obstruction, then it looks left and right to see if there is a clear path. If it detects a clear path it turns in that direction and continues forward.
The tablet mount you can see in the picture was meant to hold a 7 inch Android tablet that would interface with the 'bot, but we ran out of time to implement that. The beginnings of an Android app to interface with the 'bot is here.
An instructable with construction details is here and the Arduino source code for TurtleBot is available here.
PawsBot
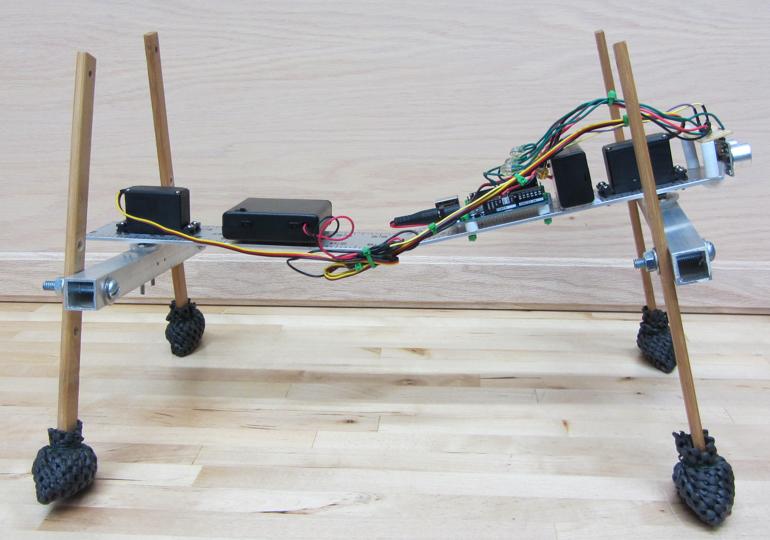
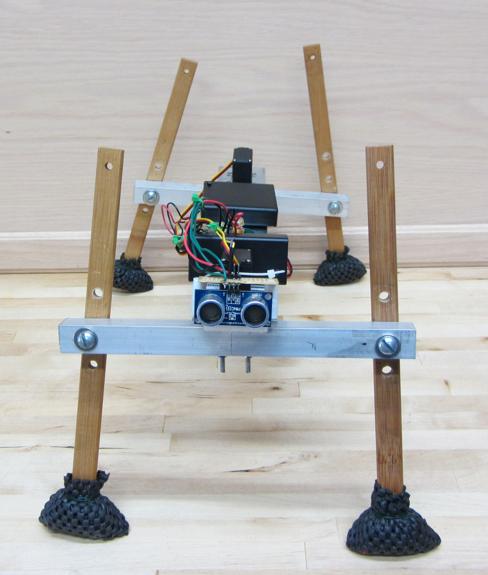
An instructable with construction details is here and the Arduino source code for the PawsBot is available here.
LegBot
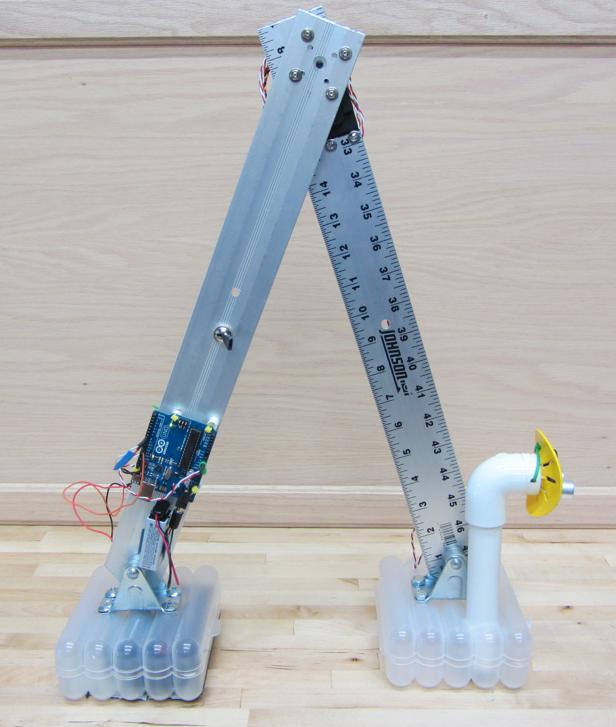
LegBot is the simplest robot of the three; it's only a positional servo and an ultrasonic range finder. It works by moving it's legs with a scissor motion and since one foot is more heavily weighted than the other (one foot contains the batteries) it slowly moves forward. Since the 'bot has no way to move backward or turn, it stops when it encounters an obstruction.
An instructable with construction details is available here and the Arduino source code for the LegBot is available here.
No comments:
Post a Comment